
GEN 2
Gen 2
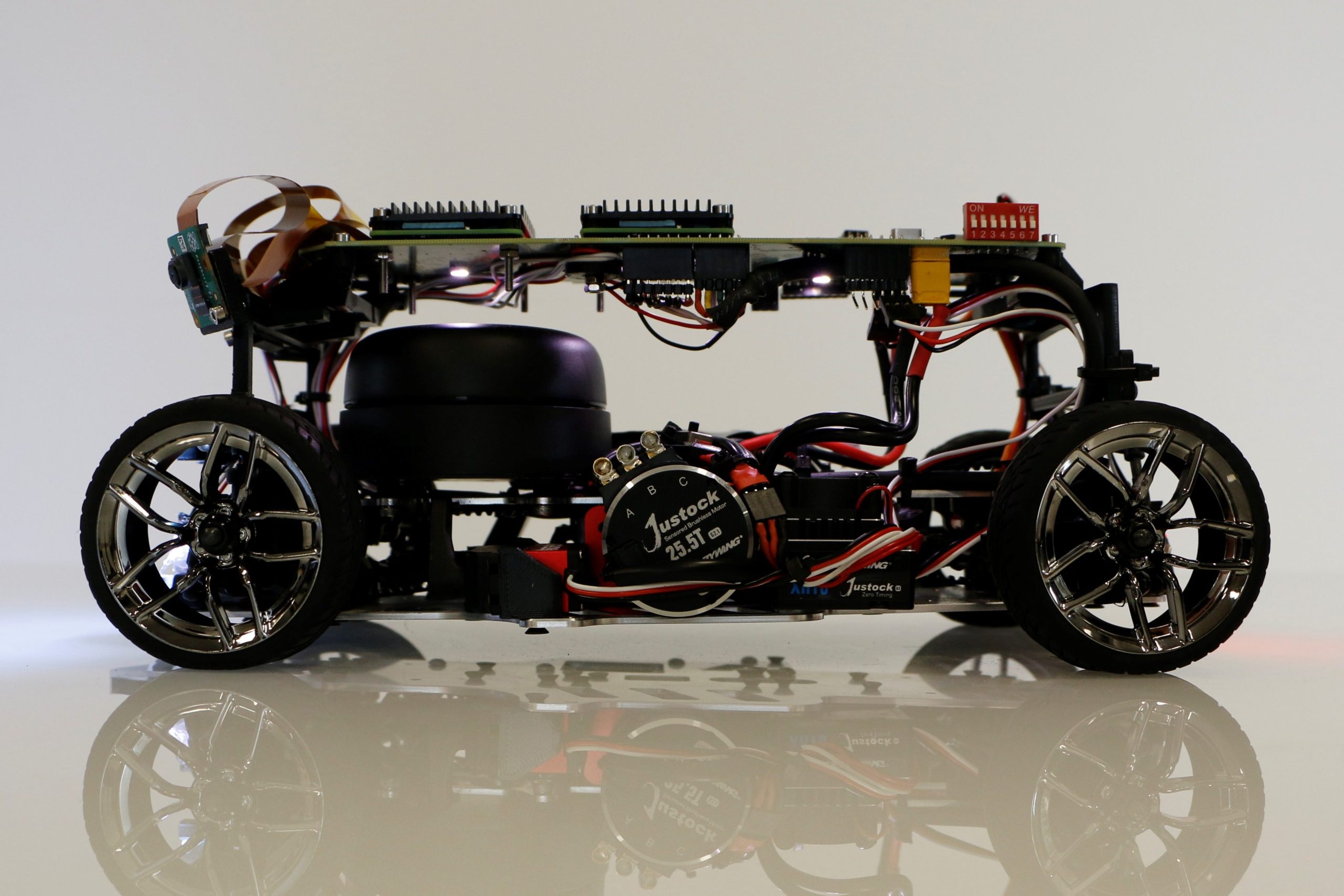
Features
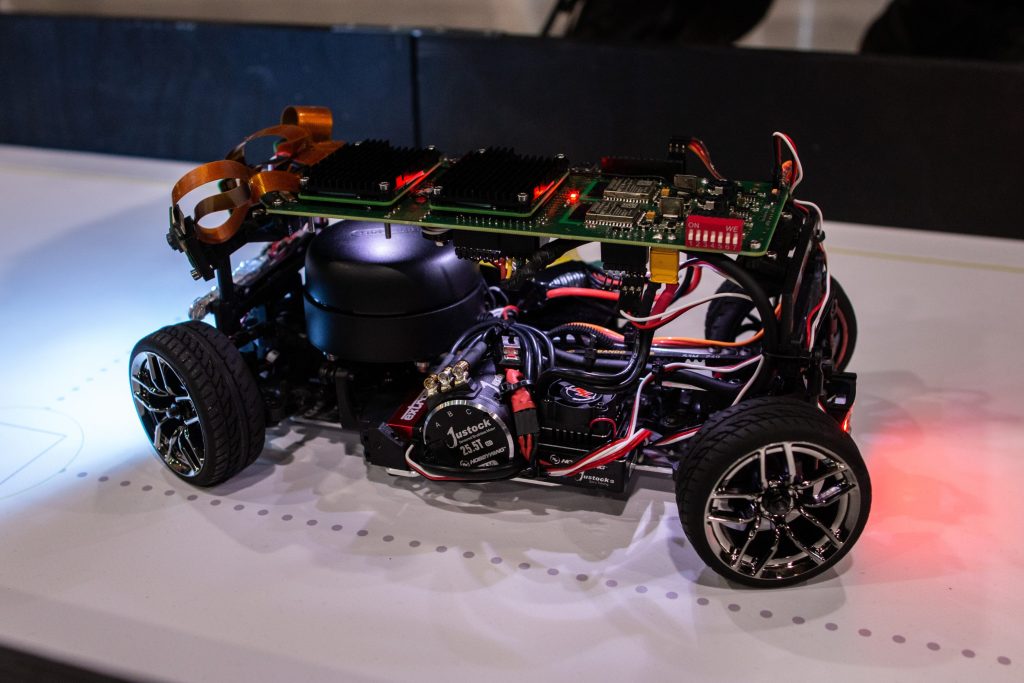
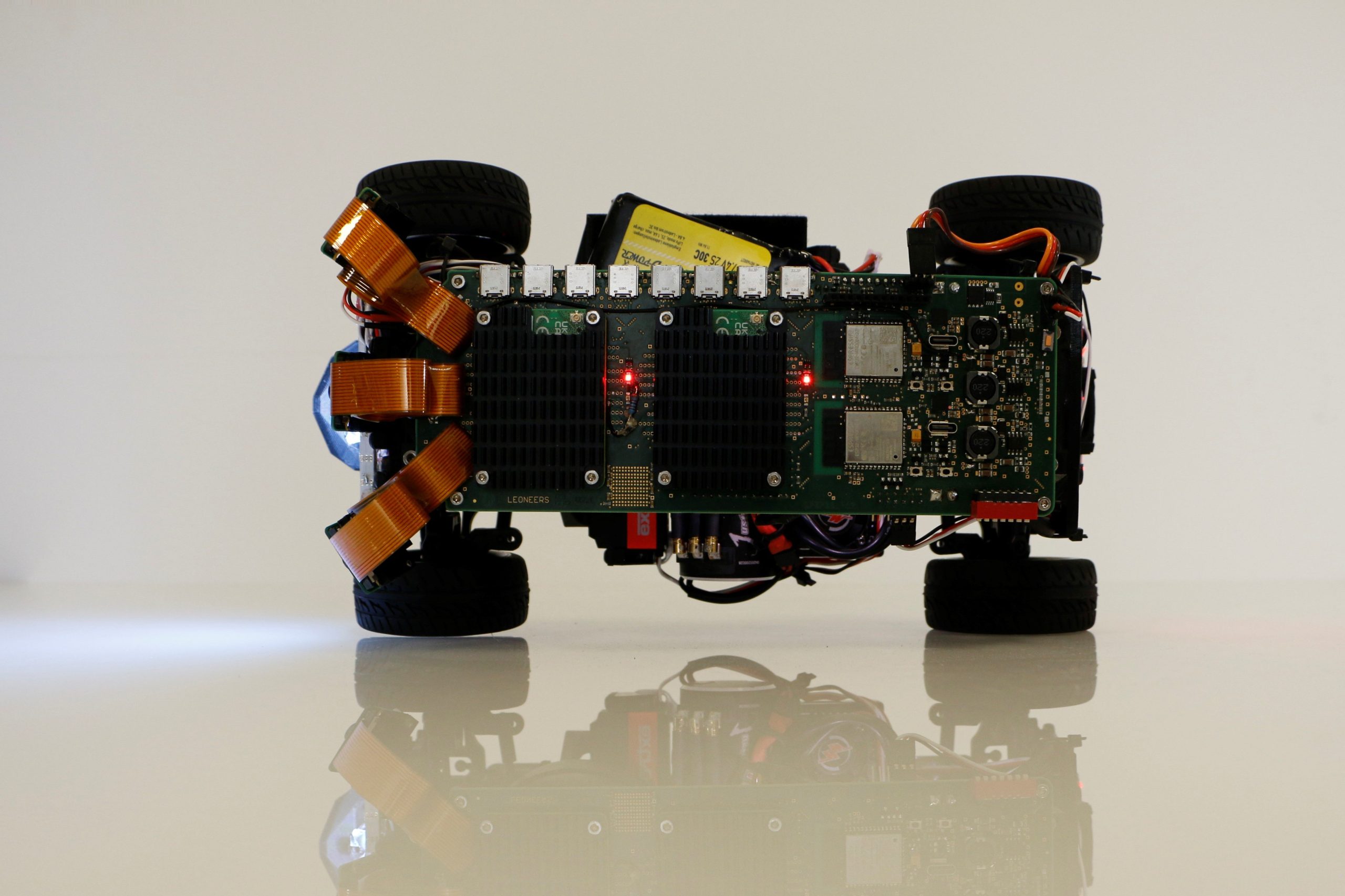
- 2x Raspberry Pi Compute Module 4
- 2x ESP 32
- custom developed circuitboard
- 2d Lidar scanner
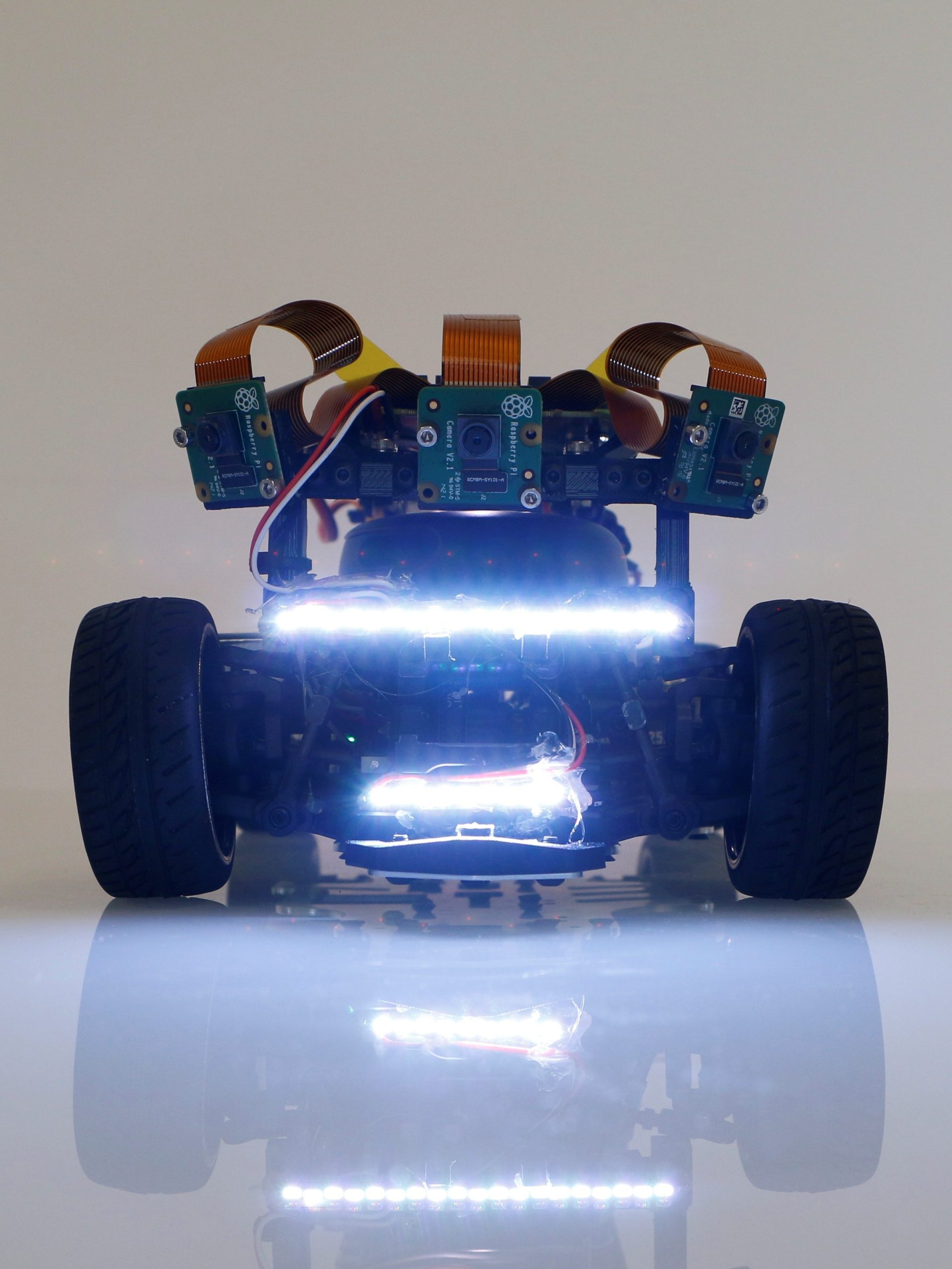
- up to 4 cameras
- 1 position camera
- MPU 6050 IMU
- all wheel drive
- all wheel steering
- intelligent lights
With the problems identified in Dortmund, the work began again for us at home to fix these problems. Due to the fact that the turning radius was too large and could not be increased on the old model, we had to install a rear-wheel steering to reduce it. We decided to develop a second prototype in order not to dismantle the car, which already worked, even if not perfect, in order to be able to fall back on a backup if necessary.
The process of building the second GEN we have documented in a video on our YouTube channel. In the video the fist driven rounds are also recorded.
GitHub
More details about the development of the second GEN, as well as technical details are available on our GitHub. You can also find parts of our code and other interesting documents there.

In the making
Double-axle steering
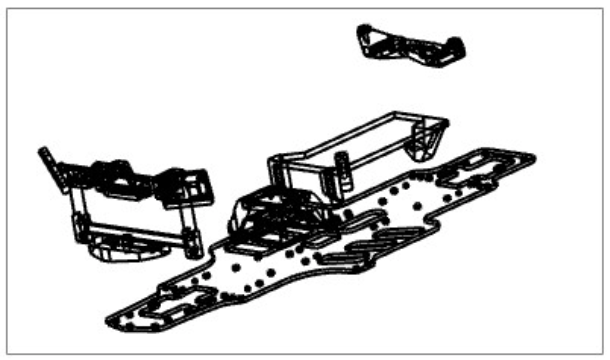
In order to install the rear-wheel steering, we first had to redesign the current base plate of the robot car in order to be able to install a steering unit at the front and rear. In addition, the position of the motor had to be changed and another servo motor had to be installed. First, we made a technical drawing on paper in order to transfer it to the CAM program.
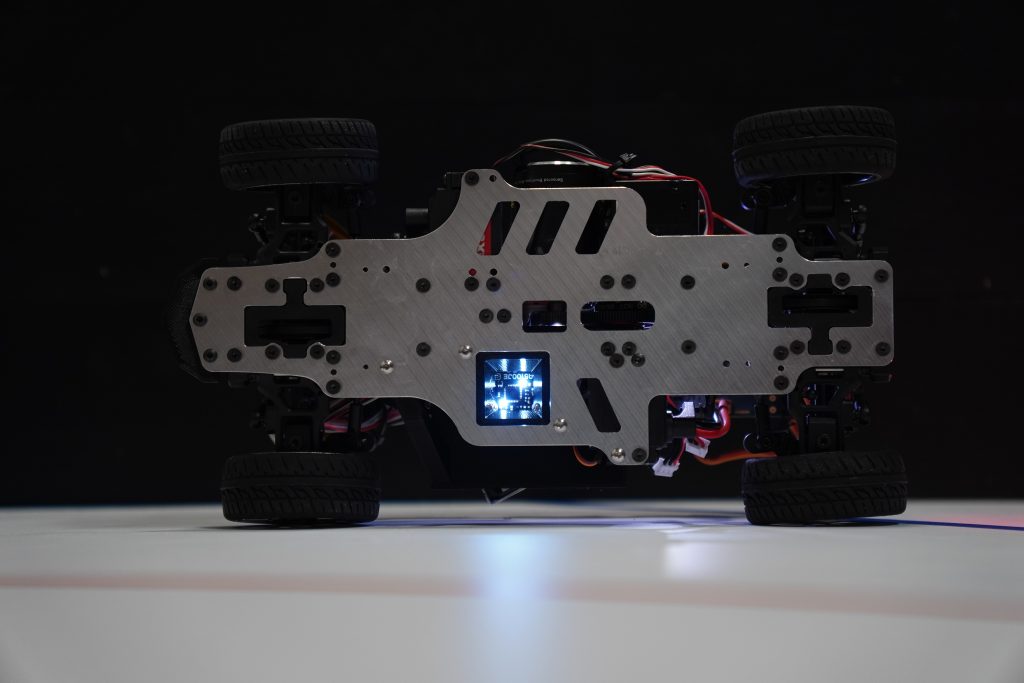
Electromechanical components and PCB design
A further conversion measure was accompanied by the design of an own circuit board. This was probably the biggest visual difference from the new model to the old one, because thanks to the circuit board, the eye-catching wiring harness disappeared. Not only visually the board embellishes the car, but it has two built-in Rasberry Pi CM4 modules and ESP32 more computing power and saves weight at the same time.